
This year’s Valor CAD Challenge (VCC) was about creating a robot that can:
- Flip (decontaminate) a hexagon
- Deposit a hexagon in a silo
- Put a Superstructure (a cylinder-shaped object) into a Superport (a circular hole)
- Hang
This was the first time I’ve ever competed in an FTC CADathon and it was certainly challenging. When the game was revealed, I brainstormed ideas and made rough sketches of them. With many iterations of brainstorming and sketching, I decided on one idea that seemed to work well (at least in my head) in decontaminating and depositing hexagons and hanging. Because this was the first time competing in an FTC CADathon, I underestimated the time it would take to CAD the robot and ended up sleeping late in the night the last day of the competition; hence I named the robot Kafeen (from Caffeine).
Here are some renders of Kafeen:
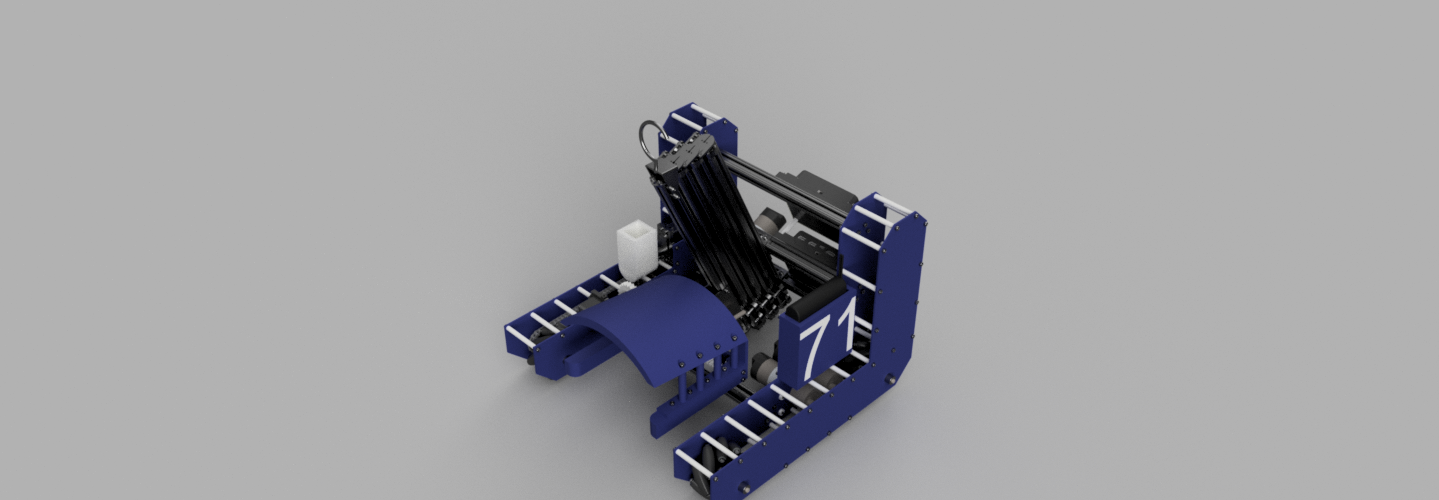
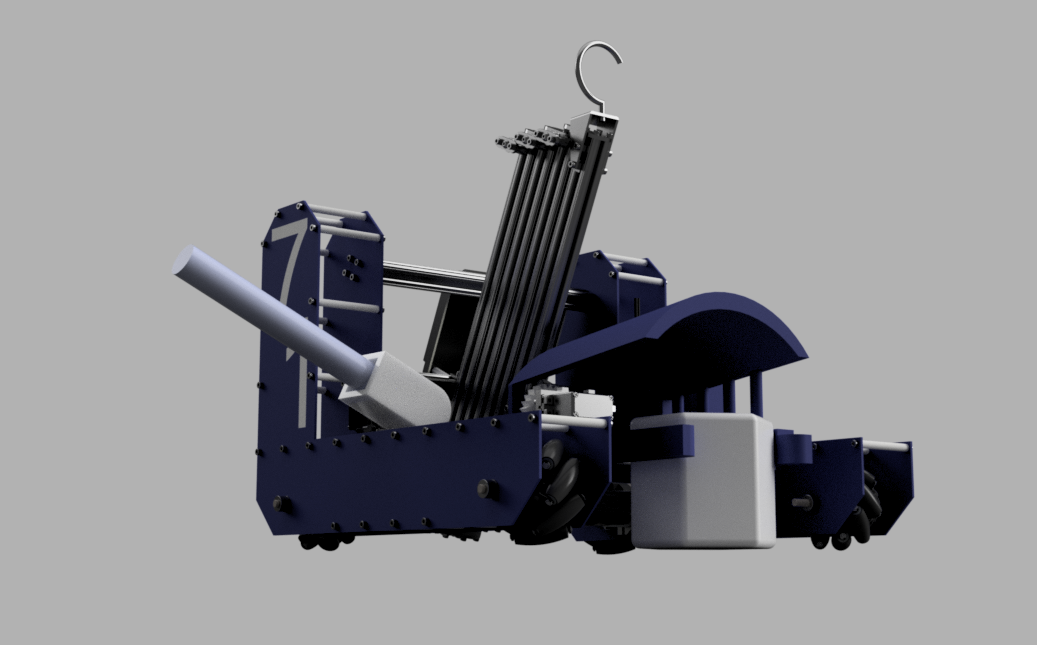
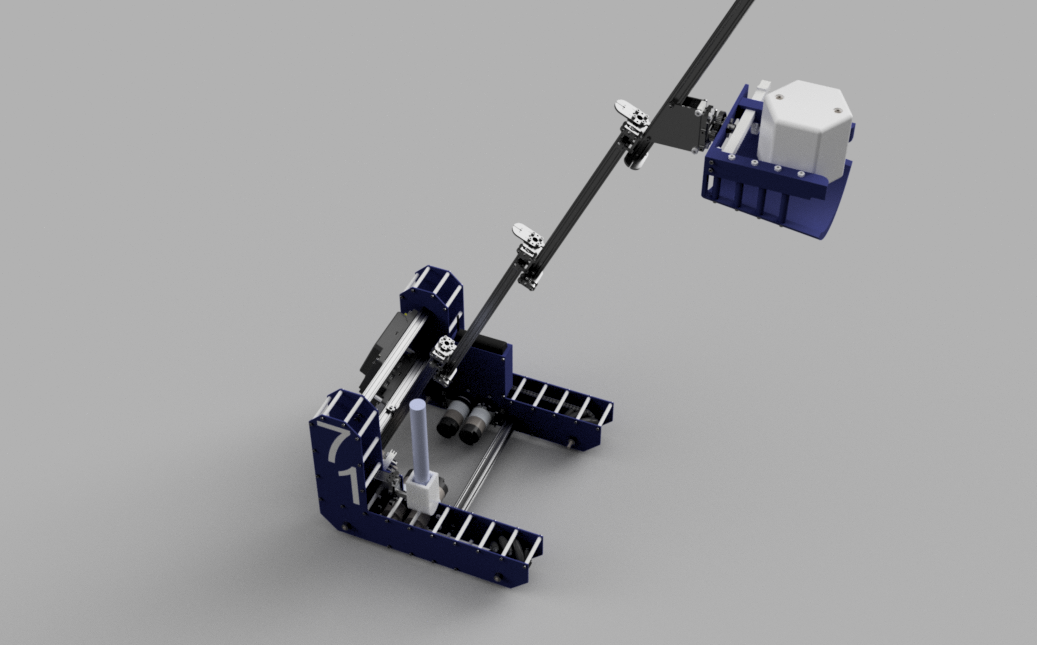
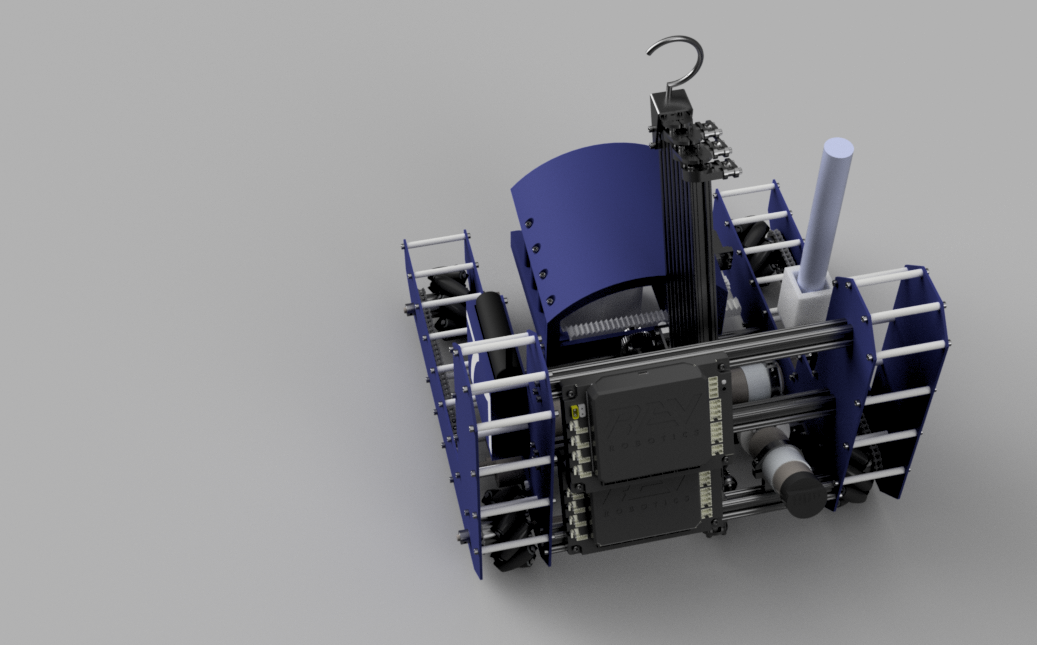
The drivetrain consists of 4 mecanum wheels connected to 4 Neverest 40 gearmotors with chains so it can navigate through the field in any direction. The lift is made up of a cascading x-rail kit controlled by a single motor with a spool. On the lift, a custom-made mechanism that uses a rack and pinion system to grab a hexagon is mounted. This entire system can be rotated by a geared servo so the hexagon can be dropped on top of a “tube” that can slide the hexagon into the silo. Finally, there is a hook that is connected on top of the lift so that the robot can hang.
Since we are doing weekly CAD lessons during this time, my hope is that we can compete in a CADathon next year in a group of 3 so we can assign certain members to do certain tasks so it is less work for each one of us while gaining more ideas at the same time.
Leave a Reply